
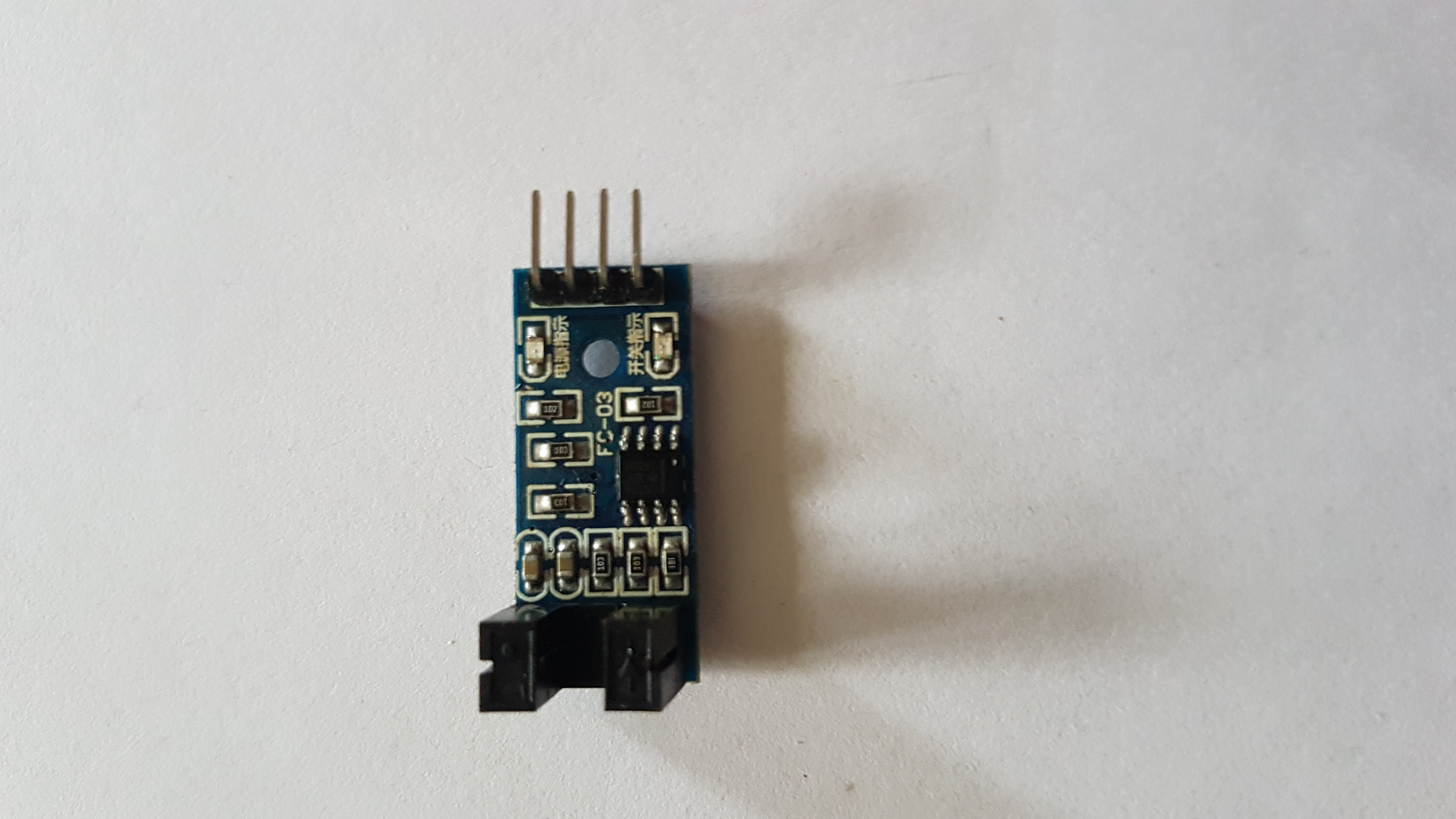

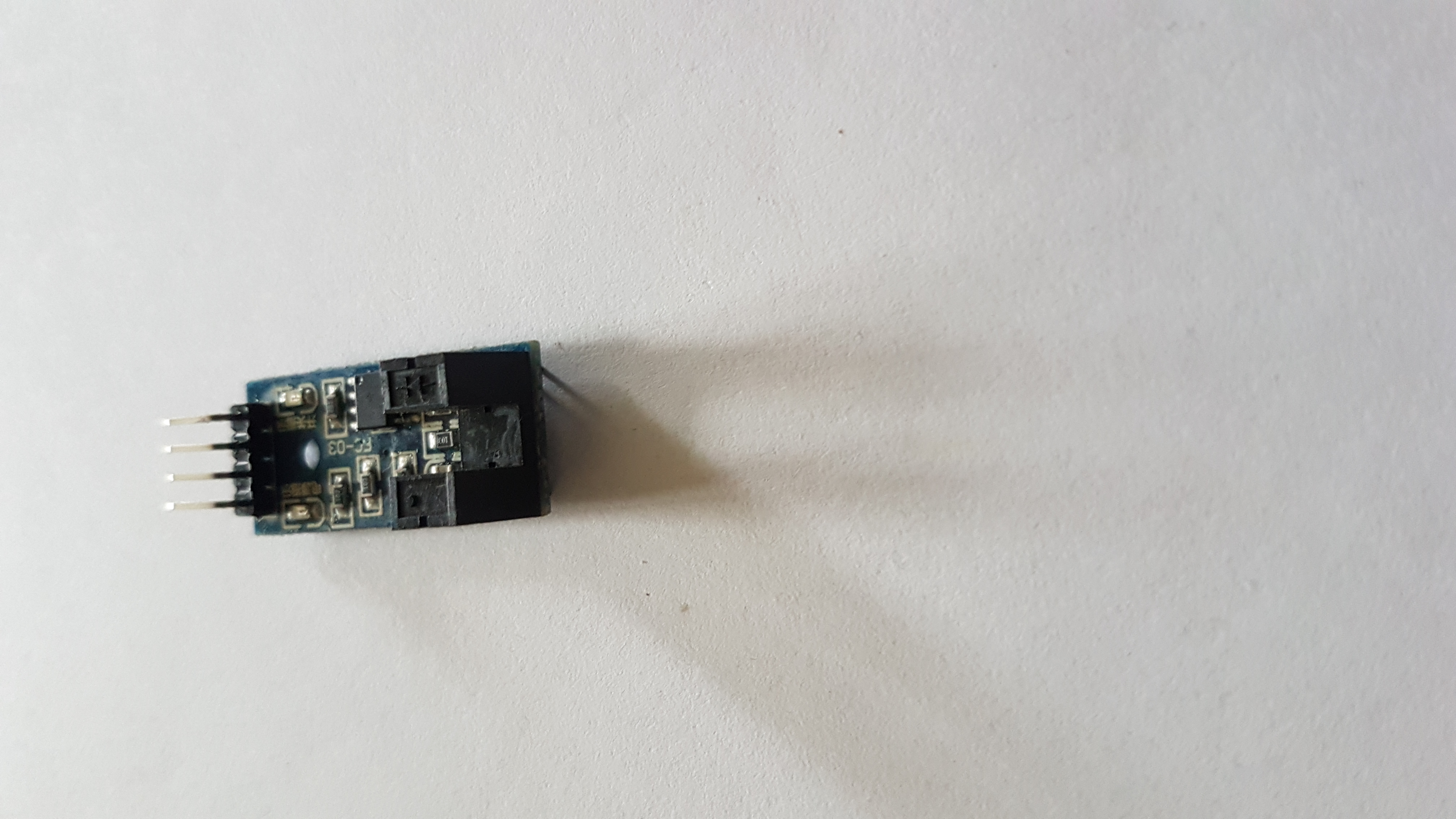
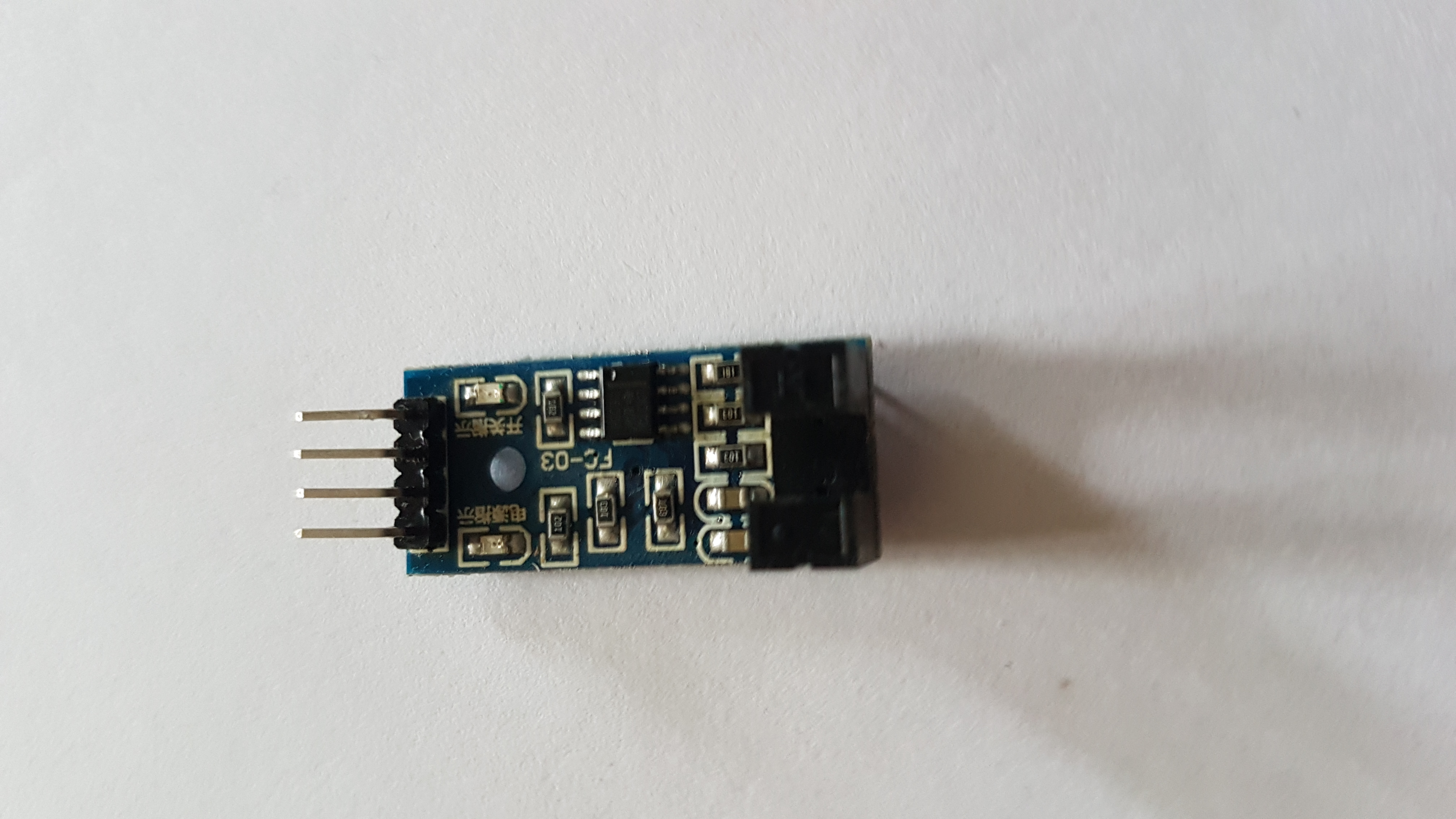
Moduł ten w połączeniu z odpowiednią tarczą umożliwia zliczania impulsów (jest enkoderem). Dane odczytane z takiego układu pozwalają na określenie szybkości obrotowej silnika, oraz obliczenie przebytej drogi w określonym czasie, przez koło napędzane tym silnikiem. Enkodery umożliwiają robotowi napędzanemu dwoma silnikami (jeden silnik na jedno koło) na jazdę w linii prostej (przy odpowiednio napisanym algorytmie).
Przykłady (kod arduino, rysunki, schematy, filmiki)
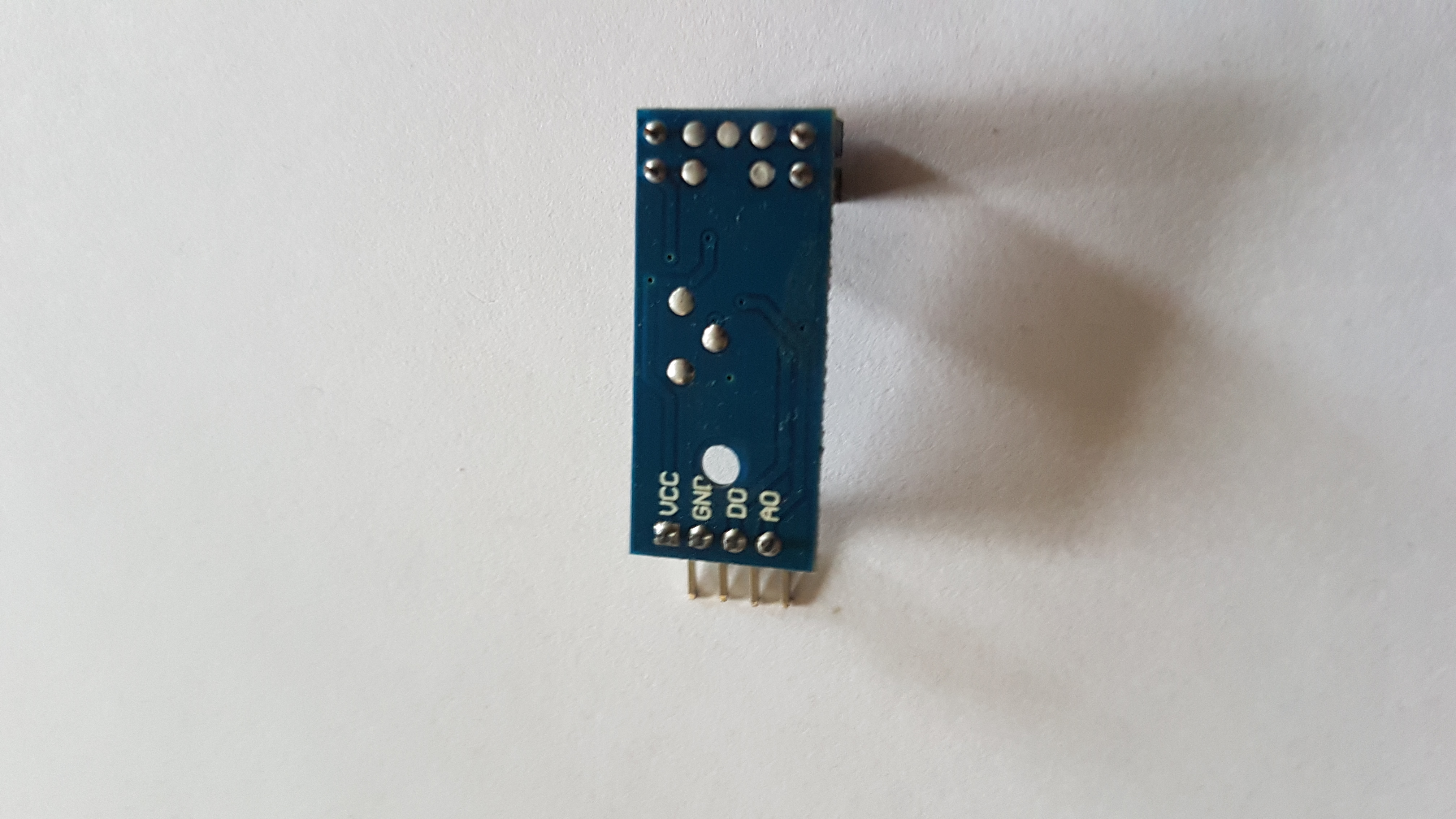
Transoptor szczelinowy (czujnik szczelinowy)