
SILNIKI ELEKTRYCZNE - sterowania silnikiem z poziomu mikrokontrolera np. arduino i nie tylko.
Jeśli można przyrównać budowę robota, maszyny do ciała ludzkiego to odpowiednikiem mięśni i ścięgien w przypadku elektroniki będą silniki elektryczne (można też elektroniką sterować silnikami spalinowymi i innymi, ale obecnie nie planuje tego typu projektów). W tej zakładce chciałem przedstawić ich rodzaje i modyfikacje jakie mamy do dyspozycji jako hobbyści (zamierzam omówić i pokazać tylko te które praktyczne przetestowałem lub w najbliższej przyszłości użyje w jakimś projekcie).








W silnikach szczotkowych jak i bezszczotkowych (zasilanych DC) możemy zmieniać np. za pomocą arduino takie parametry jak:
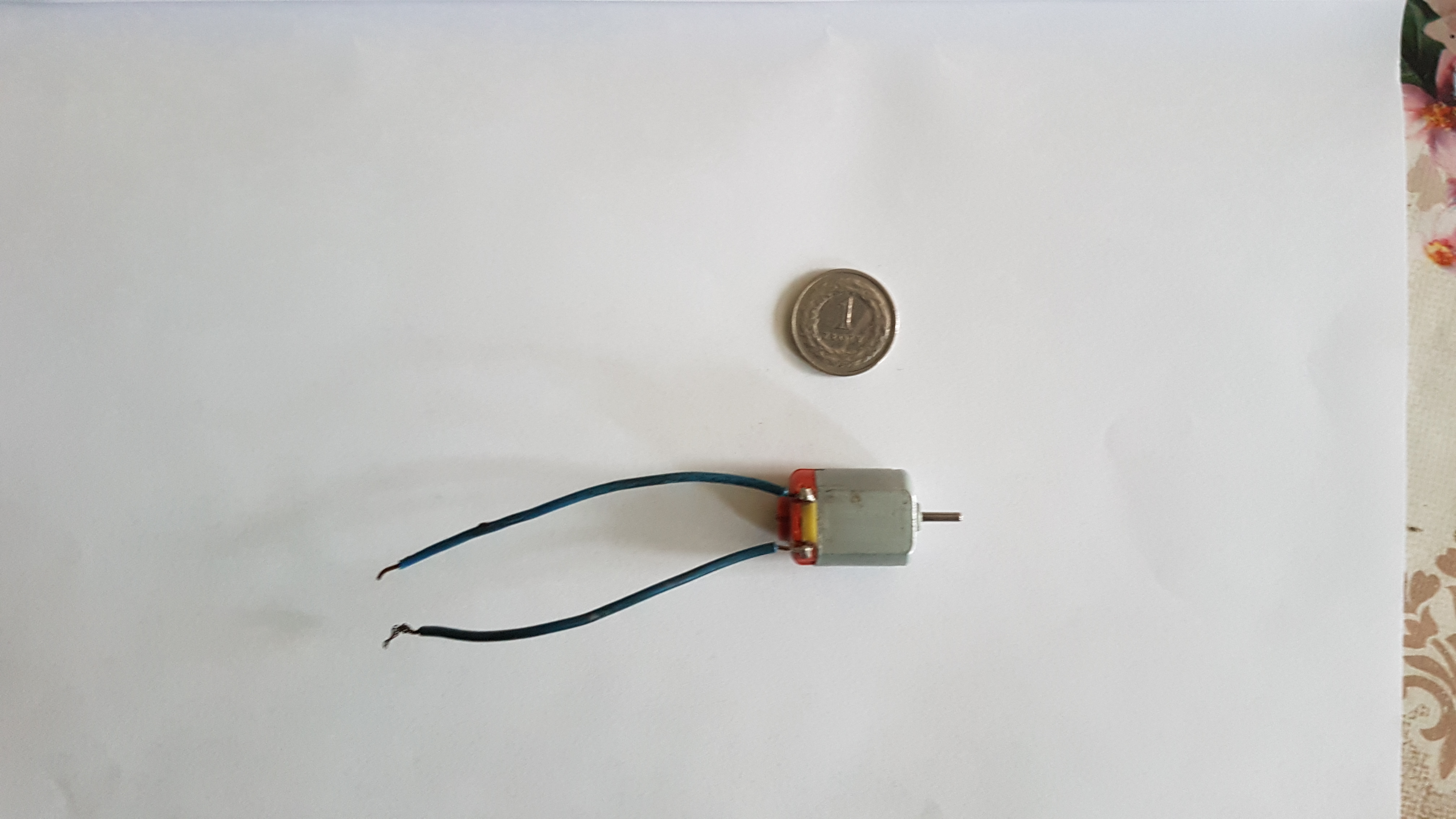
silnik-szczotkowy

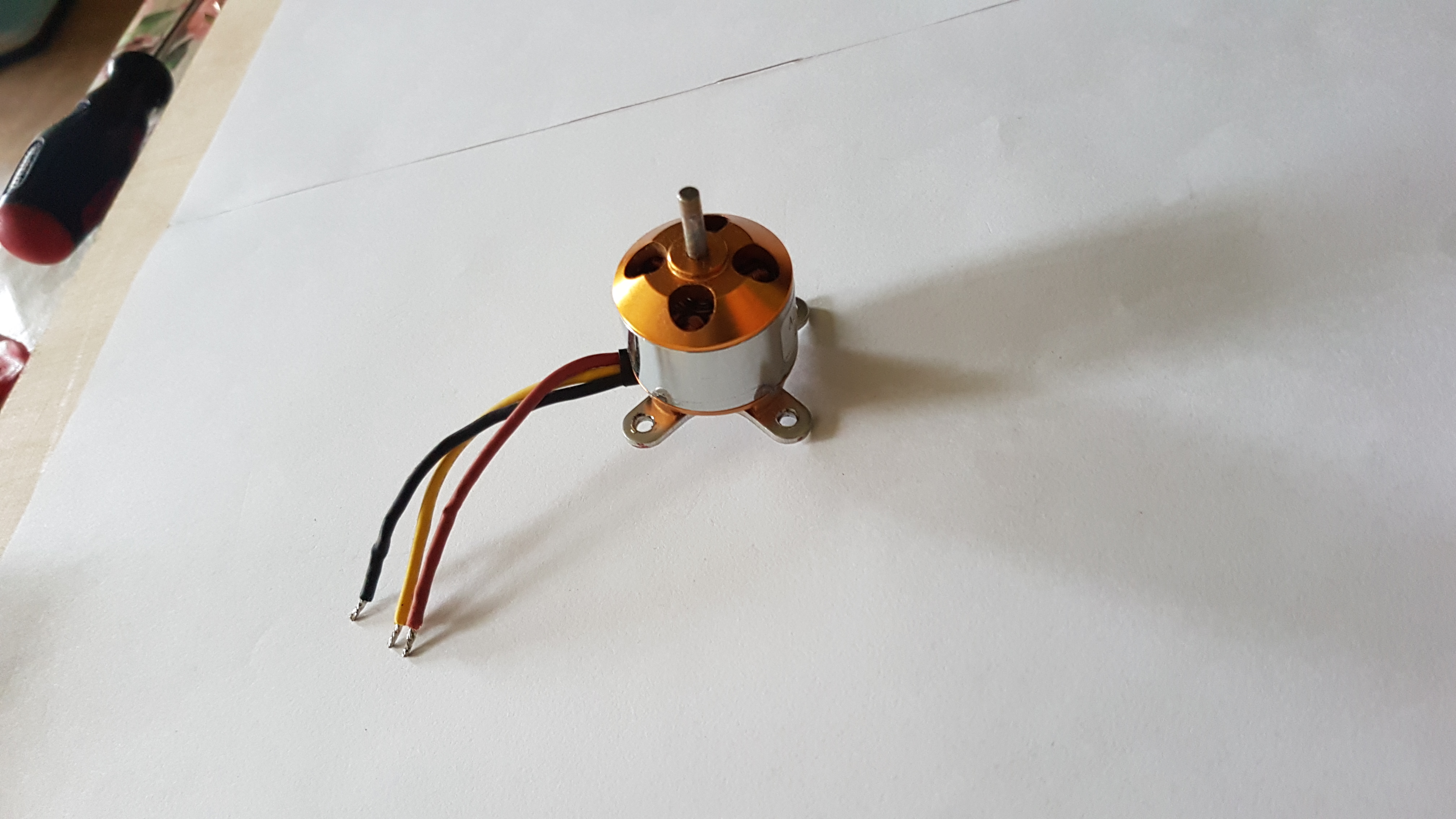
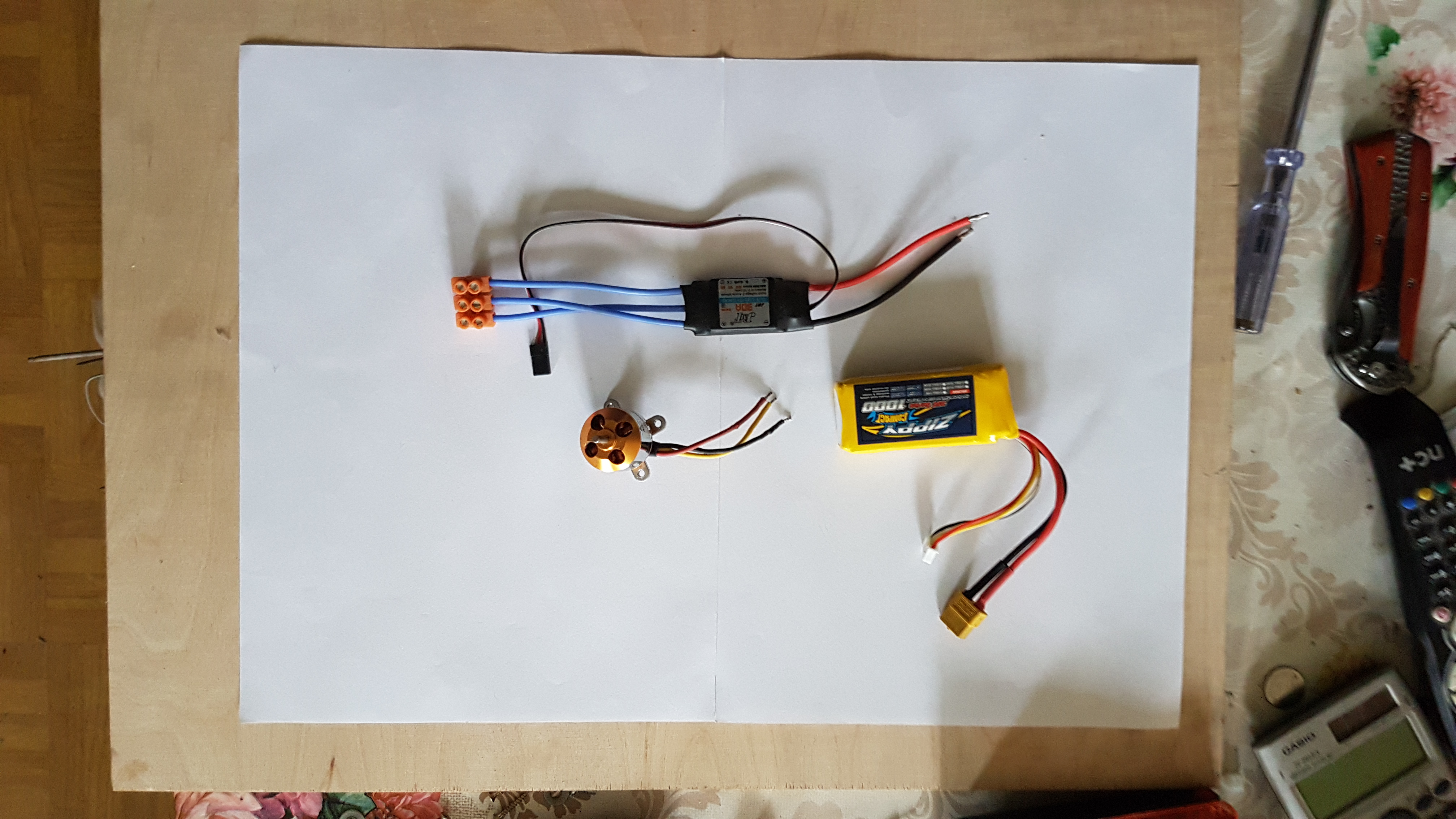
silnik bezszczotkowy
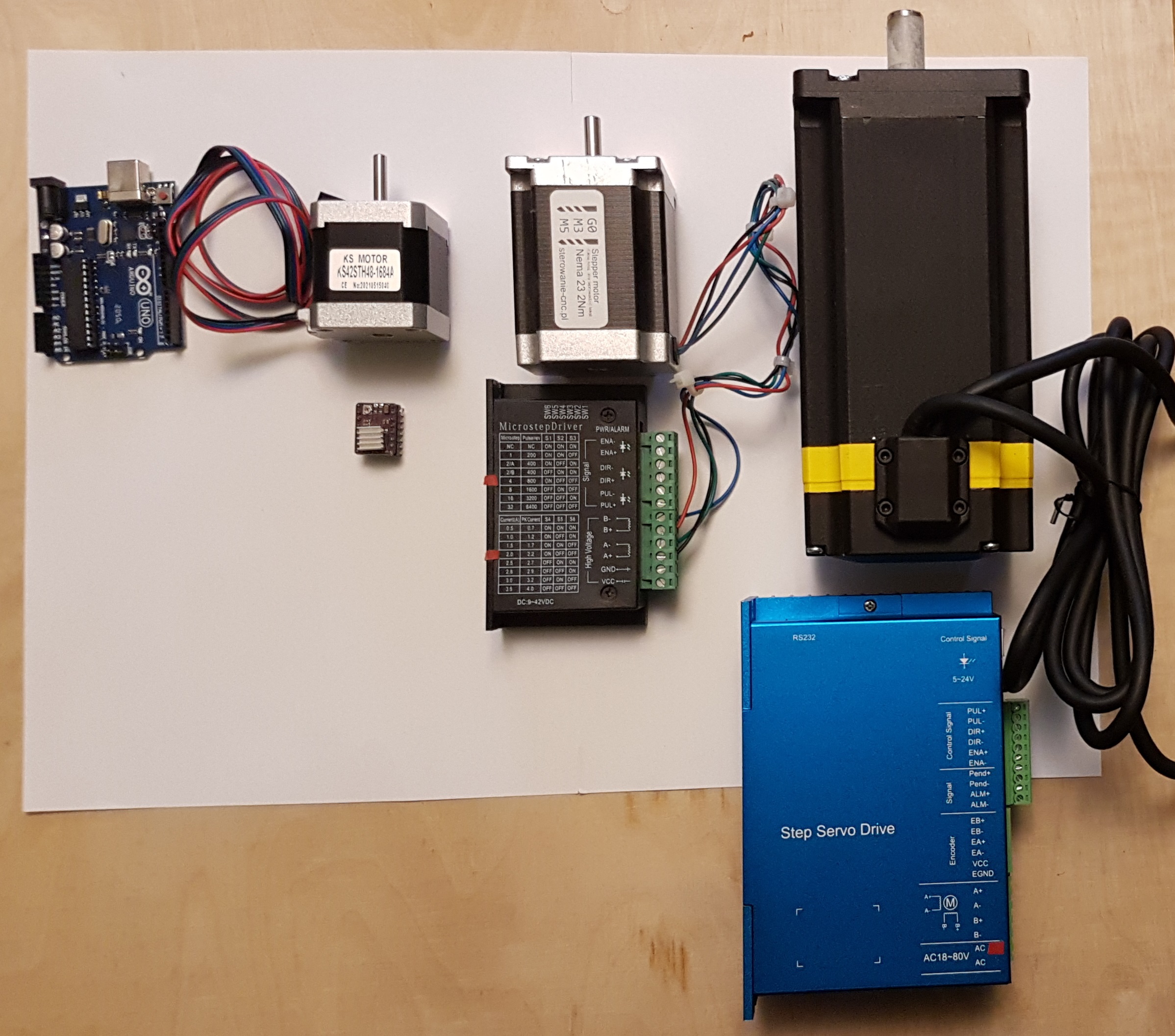
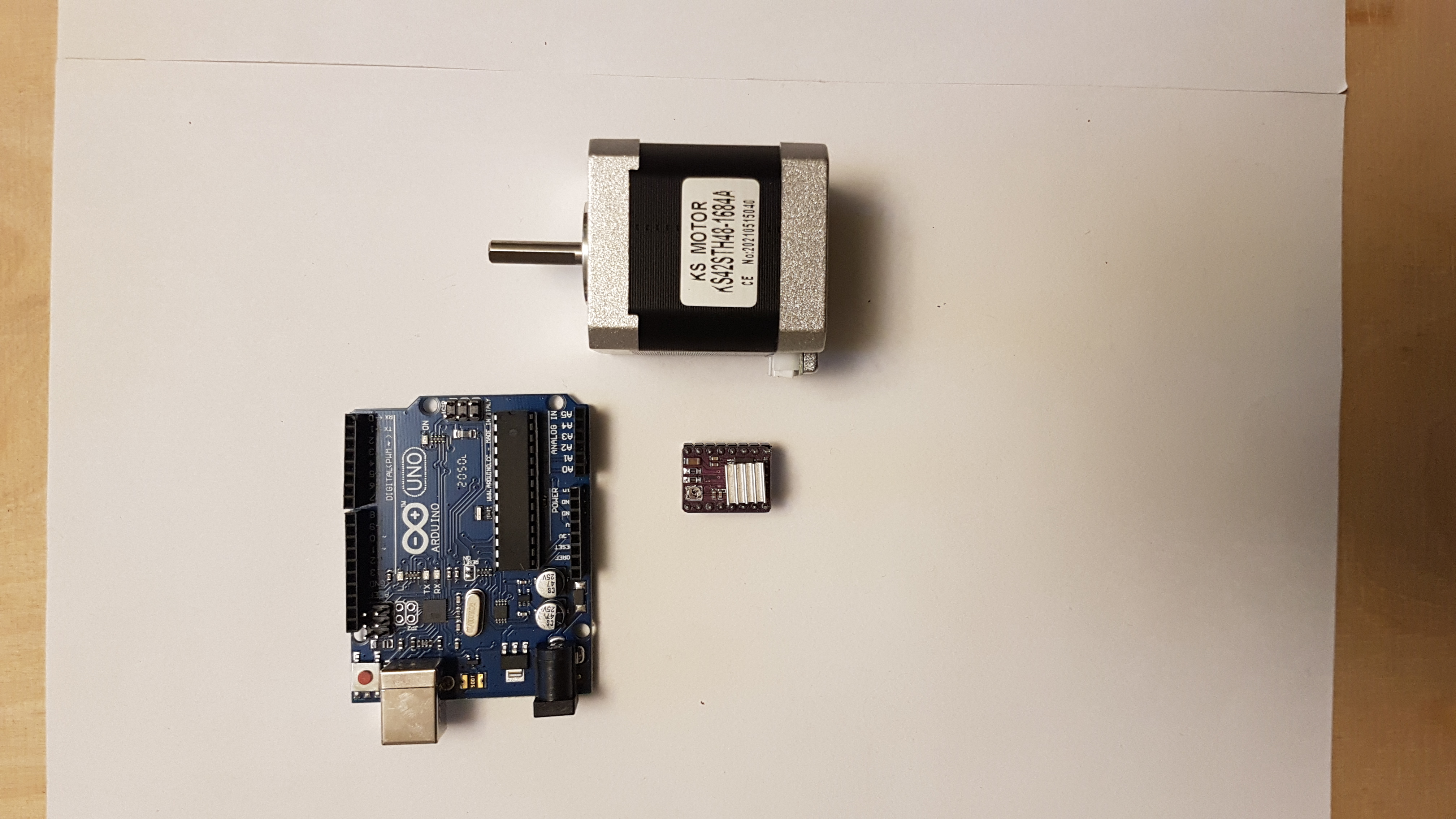
Kolejny typ to Silniki krokowe. Poza możliwościami jak opisałem powyżej ten typ pozwala dodatkowo na precyzyjny ruch bez potrzeby dodawania przekładni. Obrót silnika dzieli się na kroki (czyli na równe części) standardowo jest 200 kroków (360 stopni) na obrót (rozdzielczość można zmieniać w ustawieniach sterownika), czyli możemy zadać przesunięcie np. o 100 kroków i wtedy silnik wykona dokładnie pół obrotu (ruch o 180 stopni) i się zatrzyma w konkretnej ustalone przez nas pozycji.
Jak tą wiedze wykorzystać praktycznie ? - Silnik krokowy standardowo ma podziałkę 200 kroków na jeden obrót, dodając do niego np. śrubę trapezową o skoku 2 mm/obrót możemy wykonać przemieszczenie o konkretną drogę np. chce przemieścić coś zamocowane na śrubie o 10 mm w danej osi to wpisuje w kodzie że chce przemieszczenie o 1000 kroków (bo 2/200 =0,01 mm ma jeden krok). Inny Przykład: średnica koła w robocie samochodziku ma 50 mm czyli obwód koła ma 2*Pi*r = 2*3.14*25 = 157 mm (około, bo Pi podałem w zaokrągleniu do dwóch miejsc po przecinku ), mamy 200 kroków na obrót czyli 157/200 = 0.785 mm na jeden krok chcemy żeby samochodzik przejechał 300 mm (po idealnie równej powierzchni tyle by przejechał, w rzeczywistości trzeba by jeszcze uwzględnić nierówności podłoża) więc wpisujemy mu do przejechania ok. 382 kroki (czyli 300/0.785 ).
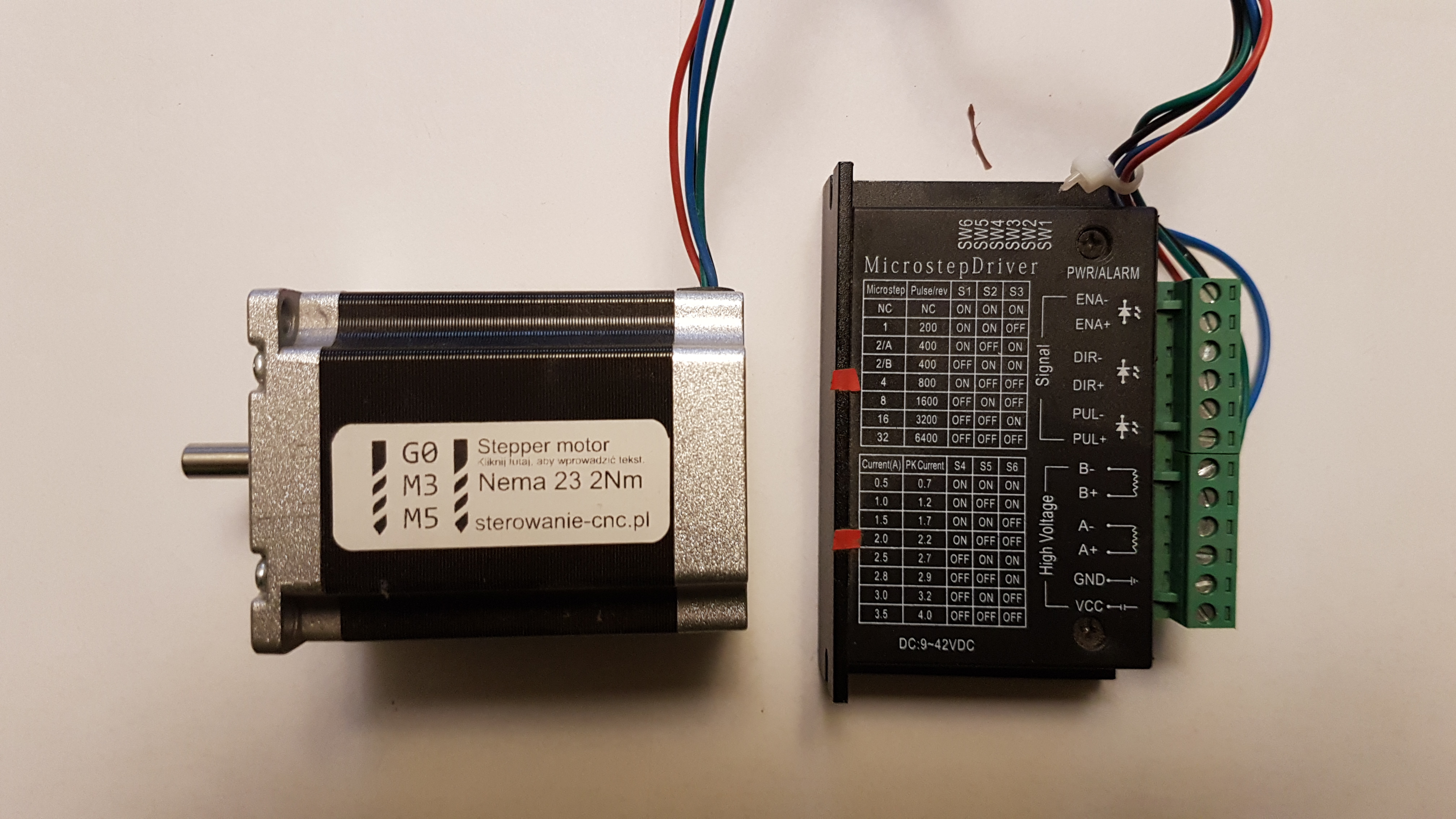
Silniki krokowe mają rozmiary podane najczęściej w zakres: "NEMA" + numer np. NAME17 ( drukarki 3D), NAME23 (np. mini frezarki CNC) i tak dalej, na podstawie tego oznaczenia można dobrać sterownik, który ma podany właśnie zakres silników "NEMA" który obsługuje, kiedy mamy już skompletowany silnik + sterownik możemy dobrać zasilanie do układu (zasilacz lub akumulator zależy czy silnik będzie używany w stacjonarnych maszynach, automatach czy mobilnych pojazdach). Na sterowniku lub w opisie podanym przez sprzedawcę dany jest zazwyczaj zakres napięcia i 2 tabele, w pierwszej podane jest jak ustawić ilość kroków na obrót (im większa rozdzielczość tym płynniej pracuje silnik ale ma mniejszy moment obrotowy czyli jest mniejsza siła ciągnięcia, - proporcje ustawiamy optymalne do naszego projektu w zależności na czym nam bardziej zależy ). Druga tabela przedstawia możliwości wyboru natężenie prądu podaną w amperach [A], ustawiamy ten parametr w zależności od wartości podanej przy silniku np. "Silnik krokowy Nema 23 2Nm 3A" czyli 3A można ustawić max (lepiej ustawić tak na ok. 60% możliwości wtedy silnik będzie ciszej pracował, nie będzie się tak grzał i dłużej popracuje nim się zużyje). A jeśli chodzi o zasilacz np. akumulator to dobieramy z takim napięciem które nie wykorzystuje sto procent możliwości tylko jakieś siedemdziesiąt procent lub mniej np. mamy zakres na sterowniku DC 9V-42V to kupujemy akumulator lub zasilacz z napięciem 24V a nie 40V, a co do natężenia [A] to staramy się żeby zasilacz dysponował prądem wyjściowy [A] większy niż potrzebuje silnik (żeby miał zapas dla bezpieczeństwa, prąd podany w specyfikacji zasilacza to nie jest prąd który płynie do silnika przy podłączeniu, tylko maksymalny prąd jaki może sobie pobrać z zasilacza silnik, jeśli silnik w opisie ma 3A to to jest maksymalny prąd jaki może pobrać z zasilacza a nie to 10A co jest podane w opisie zasilacza, natomiast napięcie[v] musi być takie same w silniku jak i w zasilaczu ).

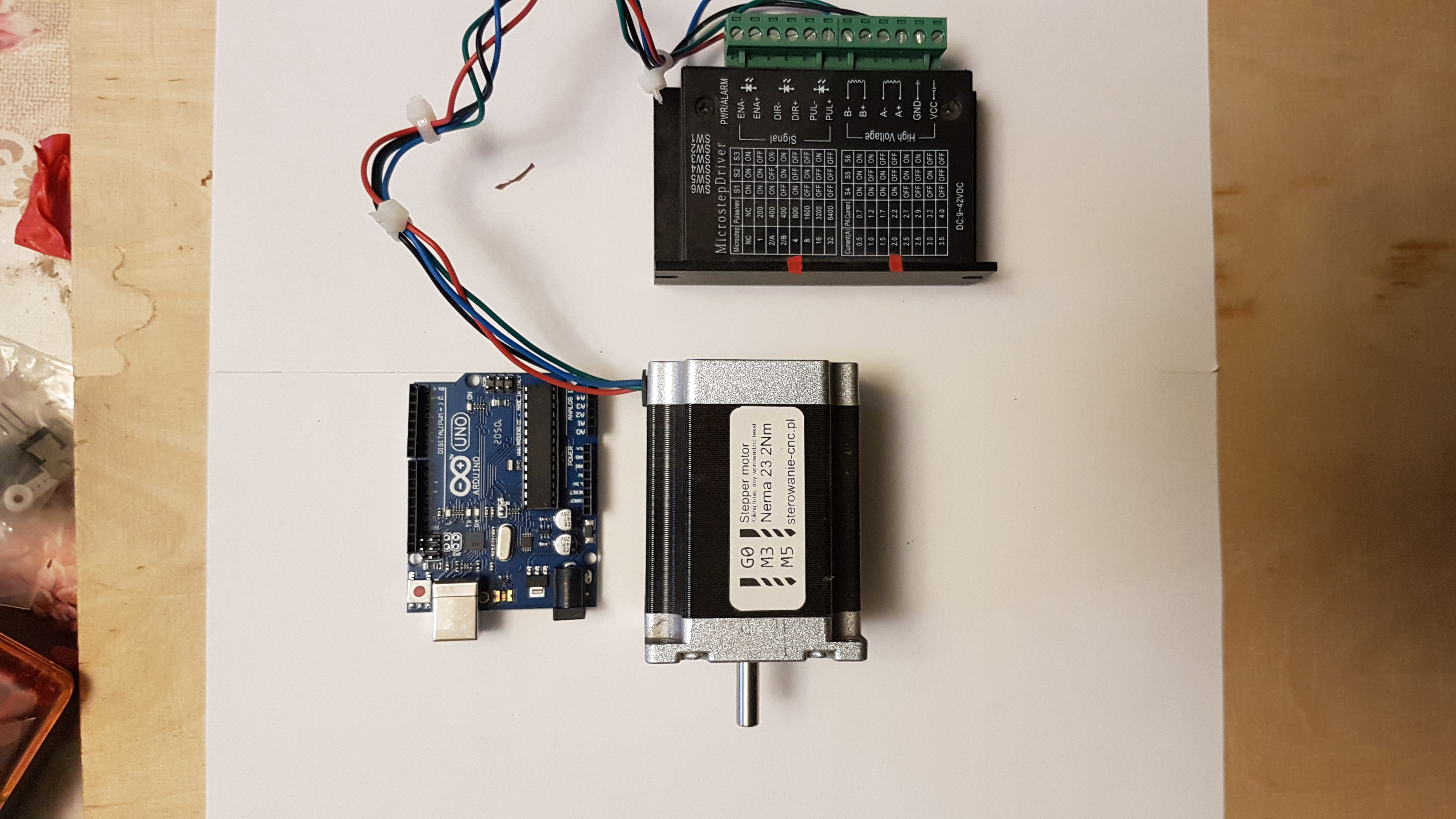


silnik krokowy
Poza powyższym mamy jeszcze do dyspozycji zmodyfikowane układy typu serva i siłowniki. Układy te poza silnikiem mają jeszcze przekładnie i dodatkową elektronikę (np. czujnik potencjometr w przypadku tych tańszych modeli serv).
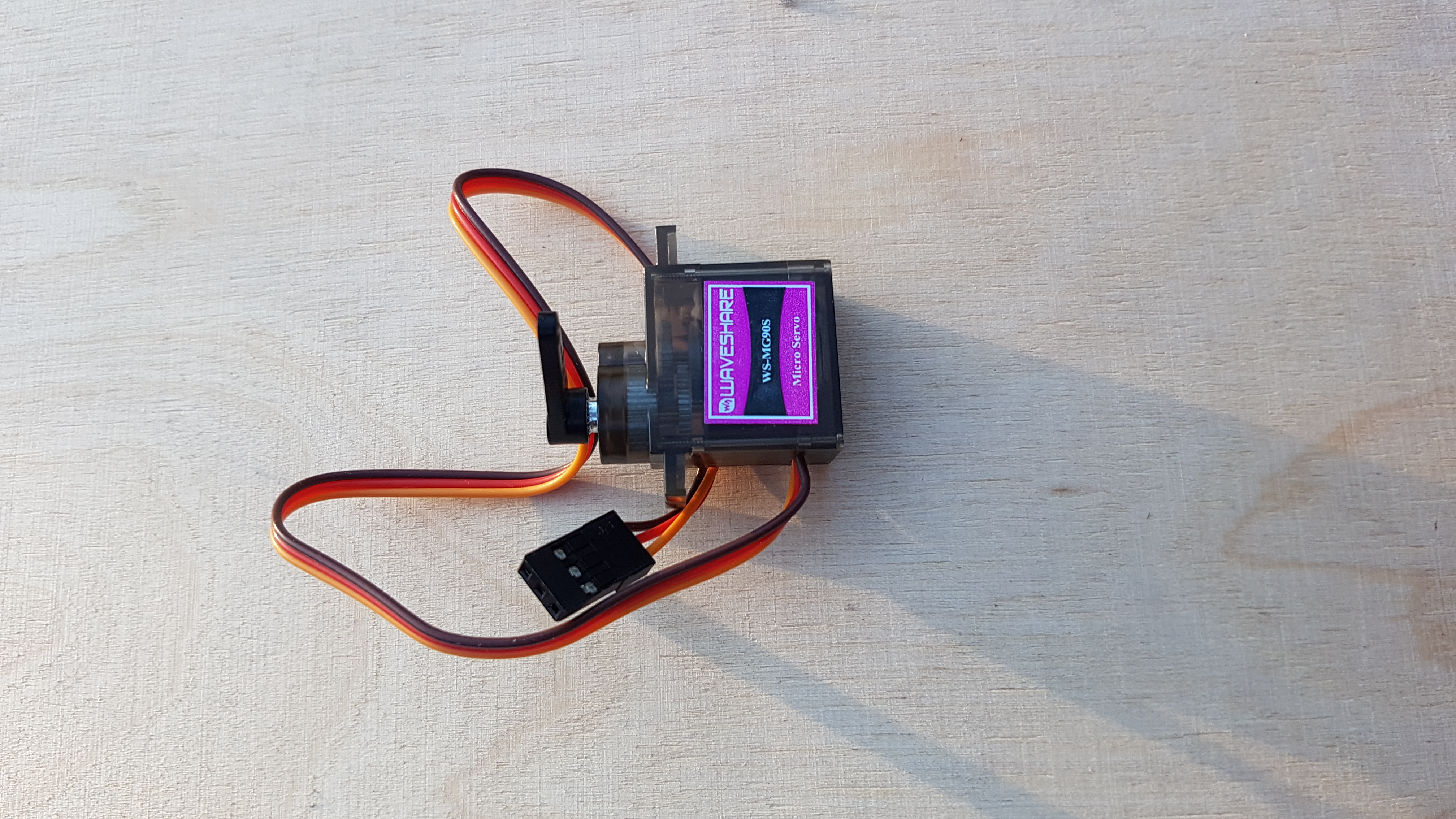
Serva podobnie jak silniki krokowe pracują przemieszczając się o zadany kont, te stosowane w modelarstwie RC mają ograniczony kąt- zakres pracy przeważnie 180 stopni i małą wagę w stosunku do silników krokowych, parametry te dobrze się sprawdzają w przypadku modeli latających.
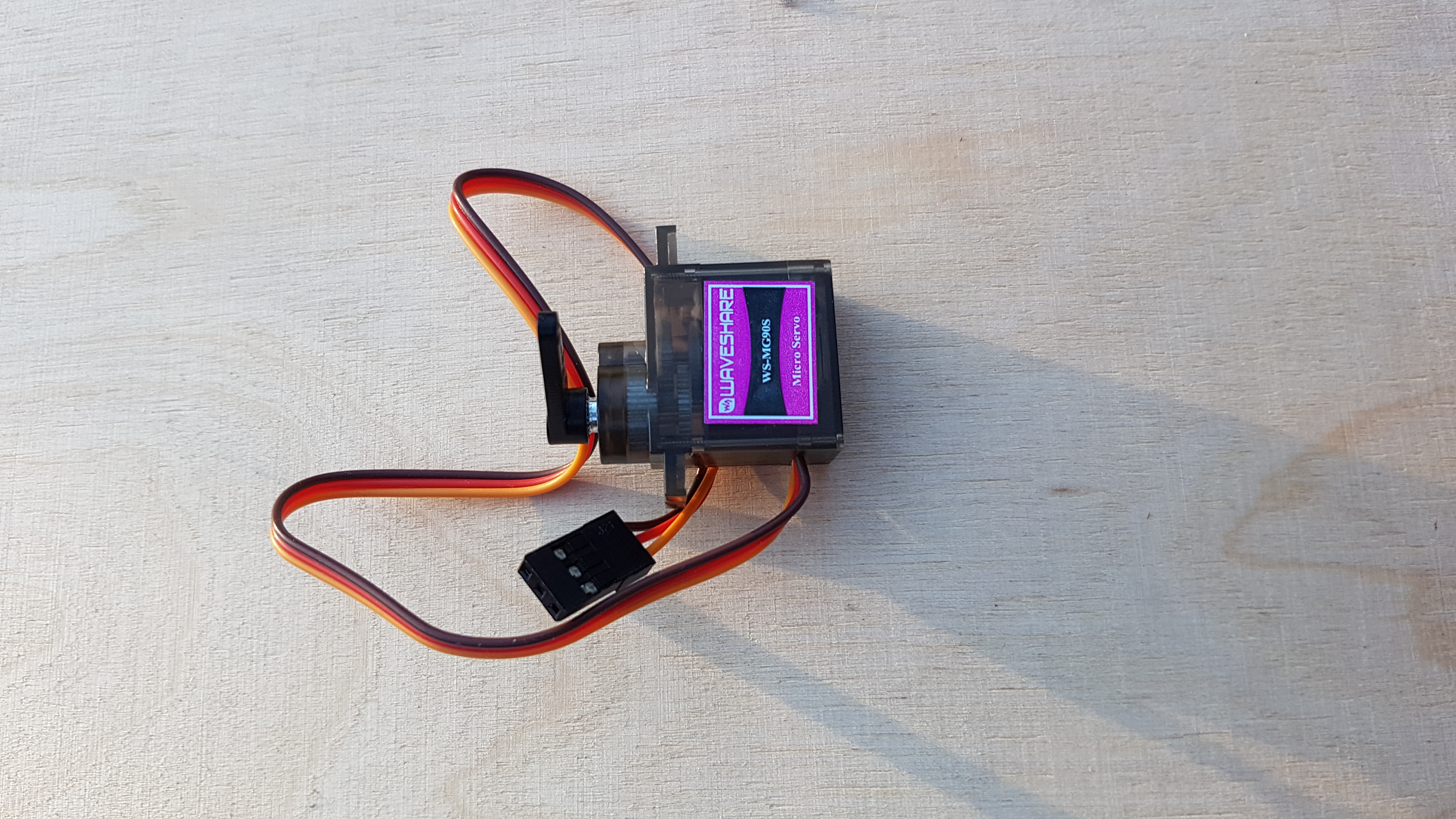
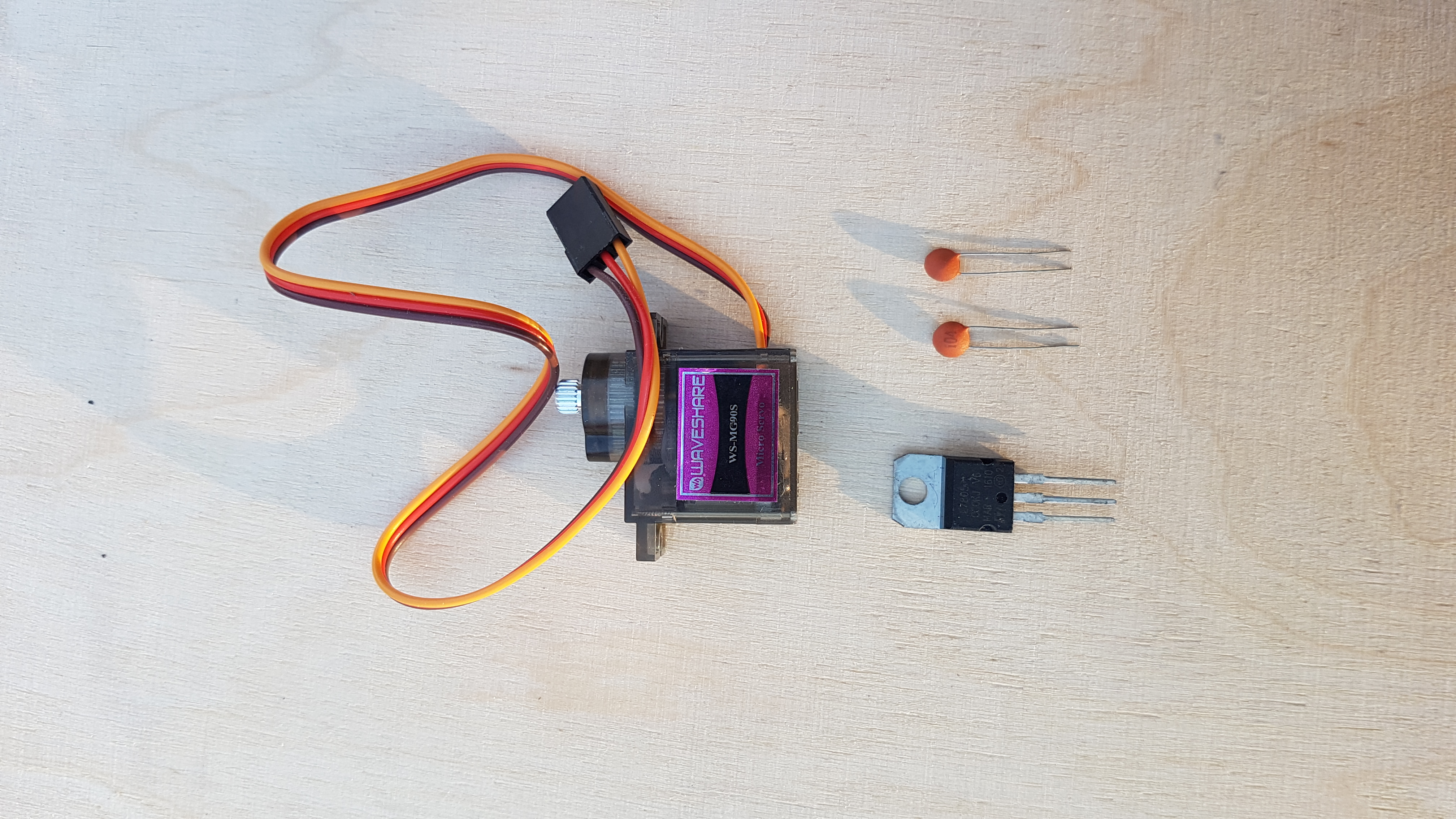
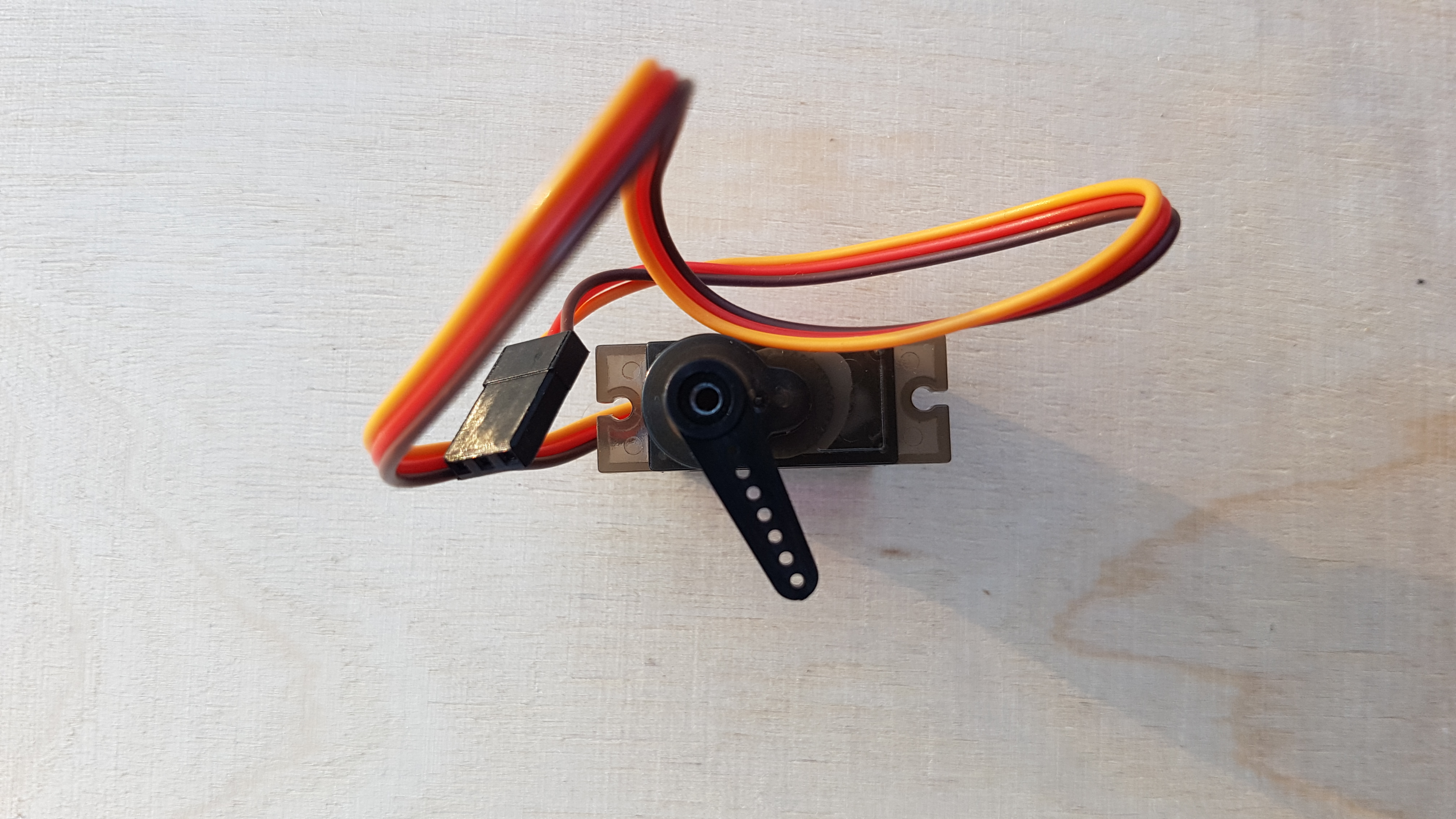



servo
Siłowniki natomiast pracują liniowo ze stałą prędkością, moją duży moment obrotowy kosztem mniejszej prędkości obrotowej, ich zakres poruszania się jest ustawiony za pomocą czujników krańcowych (krańcówek).


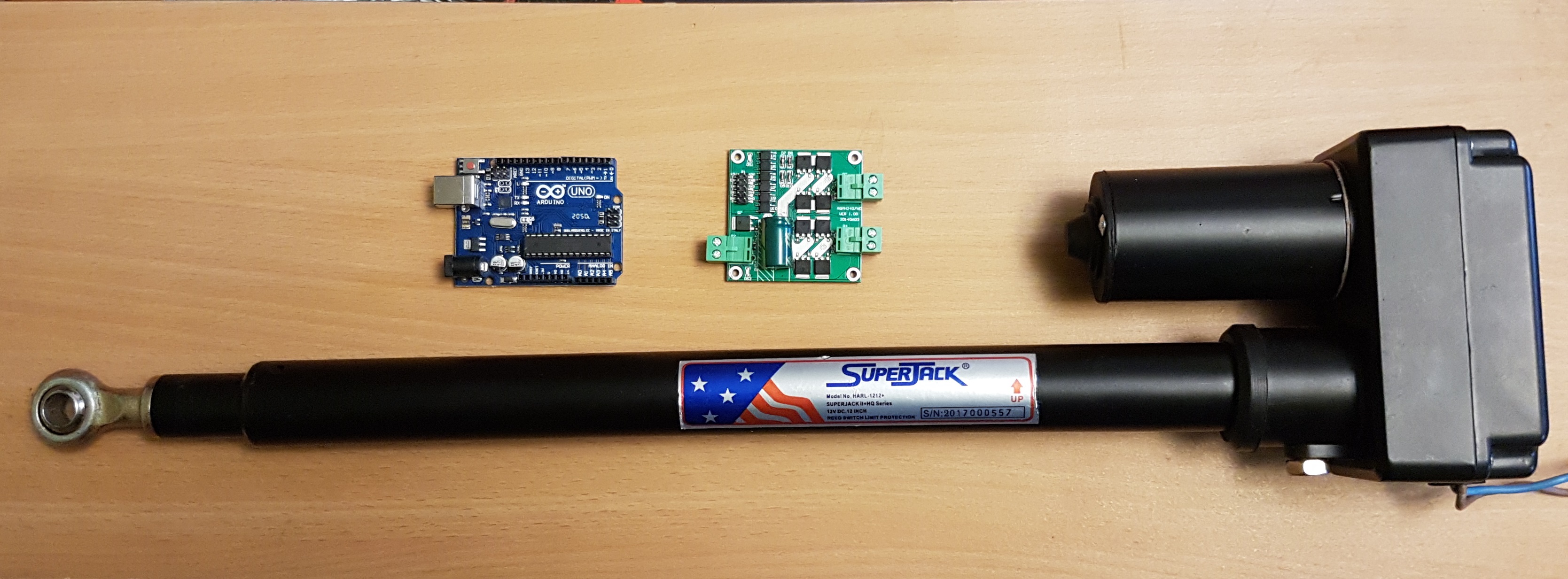
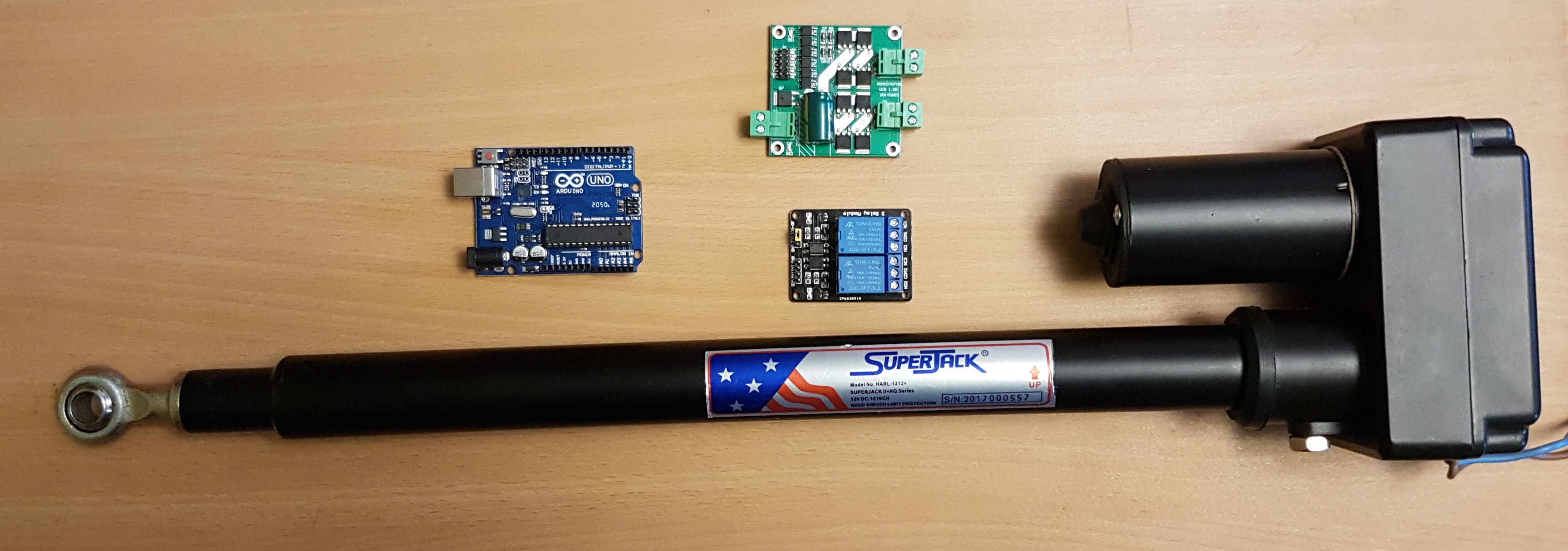
siłownik
Aby zdecydować który silnik elektryczny użyje do mojego projektu rozpatruje poniższe punkty:
Ad1. Rodzaj silnika który mi jest potrzebny do tego konkretnego projektu.
Przykład 1 Pierwsze testy (mały silnik-szczotkowy). Dobrze zacząć naukę od małego silniczka szczotkowego ze względu na cenę, małe straty w przypadku uszkodzenia, w przeciwieństwie do tych mocniejszych bezszczotkowych nie trzeba ich dodatkowo kalibrować, te małe tańsze modele -sterowniki mają komunikacje dwustronną (zmiana kierunku obrotów silnika), te tańsze bezszczotkowe jednokierunkową a można przetestować na nich kod programu np. napisany w arduino i zaobserwować czy działają tak jak chcieliśmy, a jak nie to poprawiamy do skutku program, następnie można zbudować np. robota samochodzik na dwa silniki (i przetestować działanie czujników), na takiego do jazdy po podłodze w pokoju to taki mały silniczek wystarczy. Do nauki taki o mniejszej mocy jest bezpieczny, dobrze się sprawdza w przypadku wentylatora do chłodzenia tu niema potrzeby dużej mocy.
Przykład 2 Automat np. zamek do drzwi (rygiel elektryczny, zamek domofonu) silnik bezszczotkowy. Duża szybkość tu niema większego znaczenia, niema ciągłej pracy tylko najwyżej kilka razy dziennie, silnik tu ma jedynie przesuwać rygiel a nie jakieś znaczne obciążenia, niema potrzeby przepłacać więc niewielki silnik-szczotkowy w zupełności wystarczy do tego typu projektu.
Przykład 3 Dron wyścigowy latający (silnik bezszczotkowy) tu bardzo ważne jest ograniczanie masy układu do minimum i optymalizacja wydajności sinika w stosunku do wagi.
Przykład 4 Maszyna CNC. W tym przypadku kilka różnych silników: do precyzyjnych ruchów wzdłuż osi (każdej z osobna lub kilku jednocześnie) silniki krokowe, do wrzeciona silnik-szczotkowy lub bezszczotkowy (w przypadku profesjonalnych maszyn przemysłowych silnik trójfazowy AC, dodatkowo w maszynach przemysłowych używa się jeszcze silników: do pompy ( podawania chłodziwa do pracującego narzędzia), do taśmy odprowadzającej wióry do pojemnika , do poruszania magazynka narzędziowego, do chłodzenia układów sterujących (elektroniki), do podjazdów konika i do zaciskania szczęk w przypadku tokarek cnc (w tym przypadku napęd hydrauliczny) i jeszcze dodatkowo może być silnik do automatycznego otwierania i zamykania drzwi w maszynie.
Przykład 5 Drukarka 3D trzy silniczki krokowe do poruszania osi, jeden silniczek krokowy do podawania filamentu oraz dwa silniczki szczotkowe lub bezszczotkowe (wentylatory), jeden do podgrzewania dyszy a drugi do podgrzewania stołu.
Przykład 6 Automat do zamykania bramy wjazdowej - siłownik elektryczny (w skład którego wchodzi silnik-szczotkowy większych rozmiarów, siła urządzenia została zwiększona za pomocą odpowiednio dobranych przekładni mechanicznych)
Przykład 7 Wentylator do chłodzenia elektroniki - silnik-szczotkowy. Nie musi bardzo szybko się kręcić, nie musi pokonywać dużych obciążeń, jedynie powoduje ruch powietrza, mimo szczotek które powodują straty energii zmniejszając wydajność w stosunku do wagi silniczka to i tak jest energooszczędny bo potrzebna mu jest niewielka moc do pracy. Lub jeśli nam zależy na dłuższej żywotności to silnik bezszczotkowy.
Przykład 8 Pompka do wody. W tym projekcie można użyć praktycznie każdego silnika, zależ na czym nam najbardziej zależy, czy na niezawodności i dłuższej żywotności, do stałego użytku wtedy raczej silnik bezszczotkowy, a jeśli do testów wtedy lepiej szczotkowy ze względu na mniejszą cenę i spore prawdopodobieństwo uszkodzenia w trakcie określania maksymalnych osiągów silnika podczas tego typu pracy, a może nam zależy na dużej precyzji i ewentualnym zamykaniu i otwieraniu zaworu, wtedy można zastosować silnik krokowy.
Przykład 9 Dron motorówka (model RC) - silnik bezszczotkowy. Chce żeby się szybko poruszała (pływała), a przeznaczenie to zabawa rozrywka więc silnik o niewielkich rozmiarach i wadze ale o bardzo dużej wydajności. Do testów też bym użył silniczek bezszczotkowy , bo zależy mi na szybkości.
Przykład 10 Dron łódź transportowa (model RC). Na początek wybrał bym duży silnik-szczotkowy ze względu na zasilanie mogę użyć akumulatorów żelowych, wprawdzie nie uzyskam takiej mocy i prędkości jak w przypadku gdybym użył silnika bezszczotkowego ale akumulatory na dużo dłuższy czas mi zasilą silnik, a skoro ma pływać a nie latać to waga akumulatorów mi nie przeszkadza. A i cena przy wyborze między dużym silnikiem szczotkowym a bezszczotkowym jest znaczna ( jeszcze dochodzi różnica w cenie sterowników i źródła zasilania). A jeśli miał bym większy budżet i chciał dosyć często korzystać z takiej łodzi ( do celów przemysłowych) to postawił bym jednak na duży silnik bezszczotkowy, ale napęd powietrzny (jak w przypadku ślizgacza), a nie wodny (przy użyciu śruby napędowej) ma to kilka zalet, więcej na ten temat napisze w zakładce Drony-Roboty .
Przykład 11 Dron latający typu samolot (model RC) - silniczek bezszczotkowy. Tak jak już wcześniej podawałem w przypadku dronów latających to najlepsze rozwiązanie, w przypadku modeli samolotów RC jako napęd również (a do sterowania używa się serv).
Przykład 12 Podnośnik do podnoszenia burty np. w łodzi zanętowej - silnik-szczotkowy, ponieważ ta czynność nie musi się wykonywać bardzo szybko, i niema tu pracy dłuższej ciągłej, tylko sporadycznie i zaledwie na kilka sekund, jeśli niema znacznego obciążenia to można to załatwić za pomocą serva.
Przykład 13 Dron latający transportowy. Ten projekt to większy koszt bo trzeba użyć dużych silników bezszczotkowych, albo większej ilości małych silniczków bezszczotkowych.
Przykład 14 Stół obrotowy - silnik krokowy, ponieważ pozwala na precyzyjne obrócenie stołu o zadany kąt, i na wolne obracanie jeśli zajdzie taka potrzeba co nie dało by się uzyskać w przypadku silników szczotkowych lub bezszczotkowych bez dodatkowych przekładni mechanicznych.
Przykład 15 Magazynek na narzędzia do maszyny cnc jak wyżej silnik krokowy najlepszy do tego zadania.
Przykład 16 Precyzyjny przełącznik do mechanicznego uruchamiania przycisków - silnik krokowy lub mały szczotkowy + przekładnie mechaniczne, bądź servo.
Uwaga! Powyższe przykłady to są moje osobiste przemyślenia, doświadczenia i propozycje. A to jakiego silnika użyjecie do waszego projektu to tylko od Was zależy.
Ad2. Moc silnika, moment obrotowy i prędkość obrotowa oraz zależność między nimi.
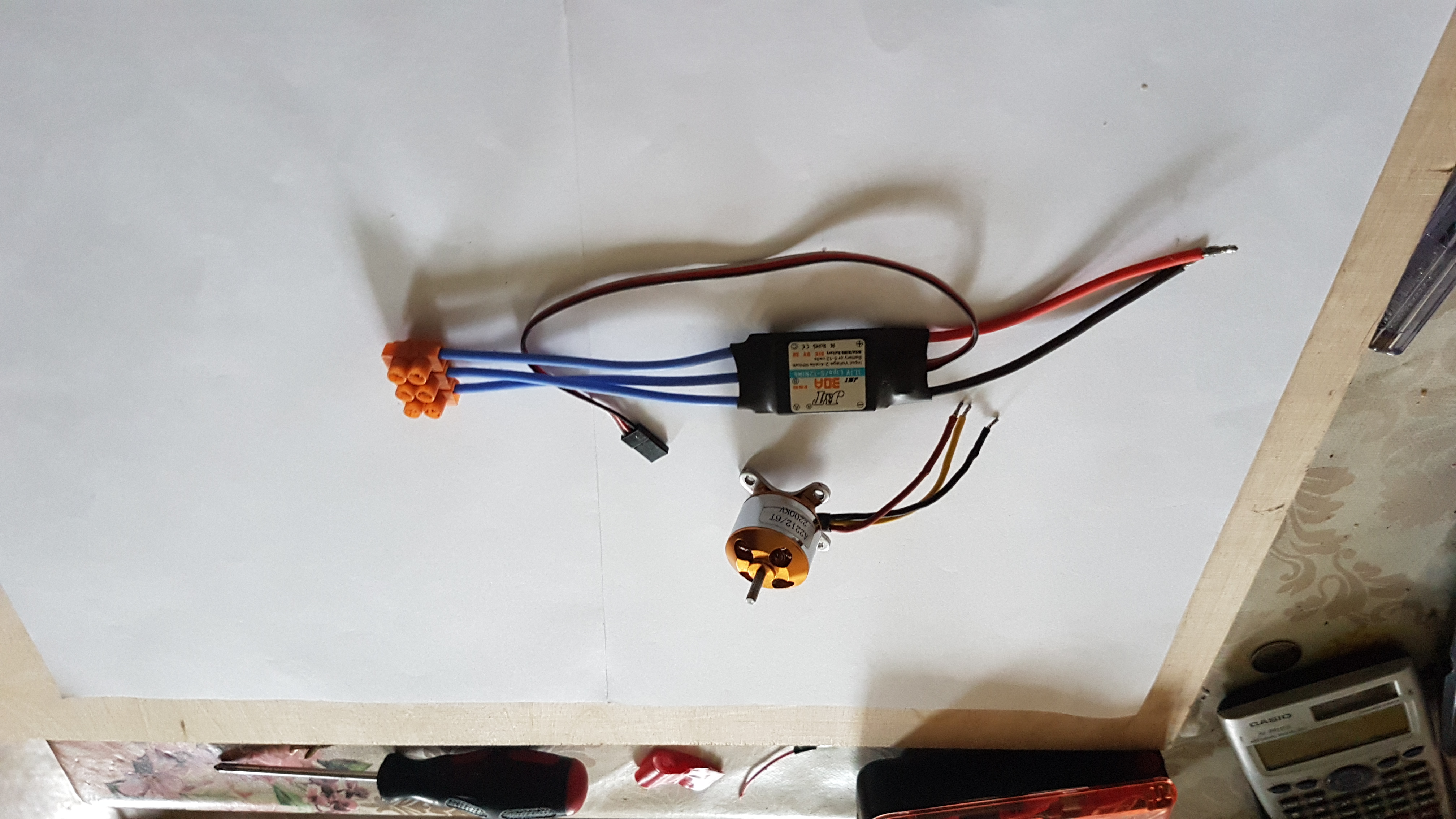
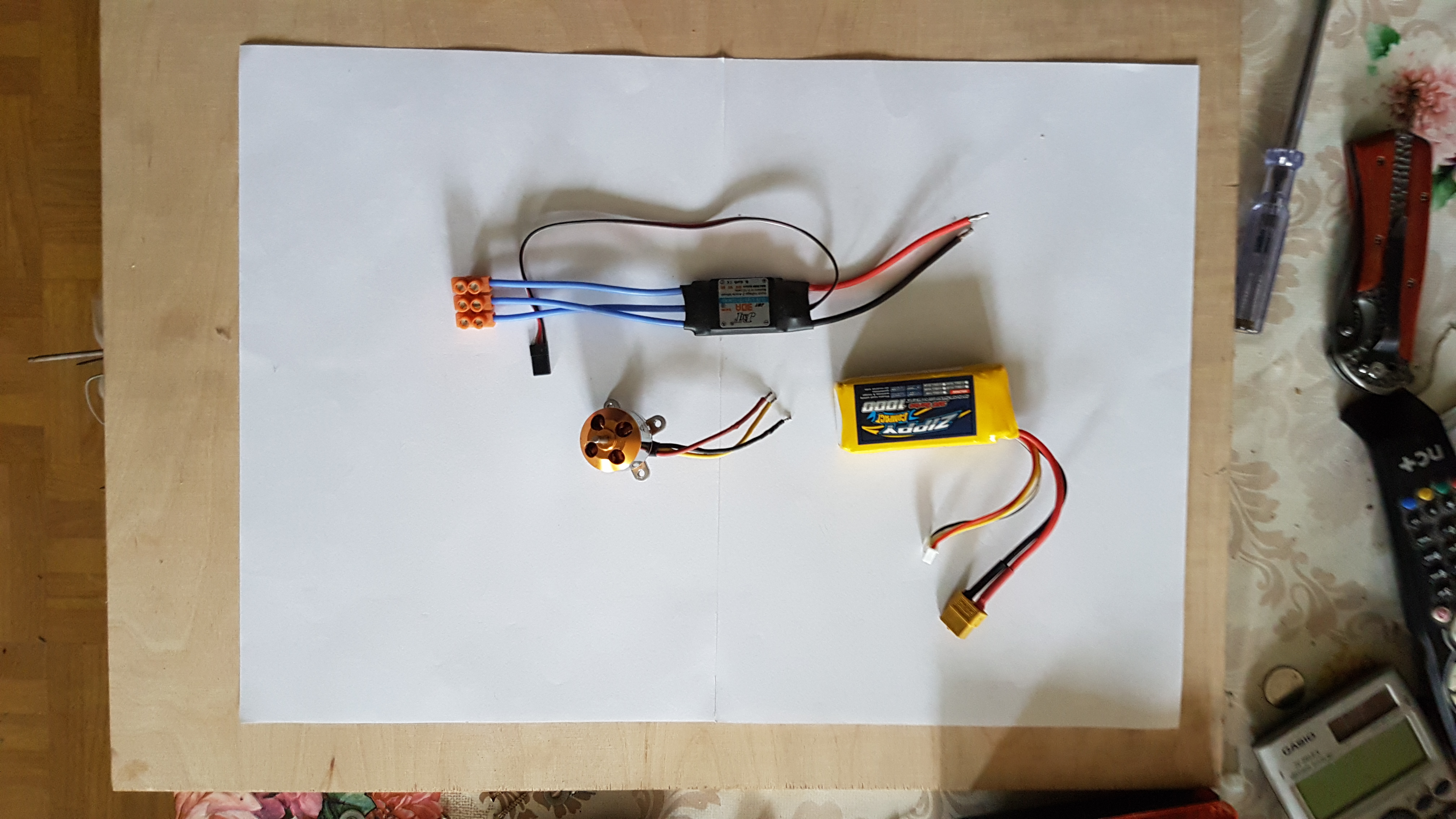
Moc wyrażana w watach [W] informuje nas jaką wydajność prądowa ma silnik. Znając moc i napięcie pracy silnika ze wzór W = V * A, możemy określić trzeci parametr Ampery [A]. Na podstawie tych parametrów możemy dobrać sterownik i zasilanie np. pakiet LiPo do silnika bezszczotkowego.
Wielkość momentu obrotowego podawana jest np. w Niutonometrach [Nm]. 1 [kg] = 9.81 [N] czyli 1 [N] = 0.10197 [kg]. Oznacza to miej więcej że jeśli silnik np. krokowy ma maksymalny moment obrotowy 2 [Nm] (moment trzymania jest zazwyczaj podawany przez sprzedawcę w silnikach krokowych , a siła z jaką kręci sczytuję się z wykresu podanego w specyfikacji technicznej silnika i jest zależna od prędkości obrotów) to znaczy że jest wstanie utrzymać ciężar 2 [N] na ramieniu długości 1 [m] (czyli odległości od wała silnika do tej siły ). Jeśli ciężar jest oddalony o 10 cm to silnik który ma 2 [Nm] moment obrotowy jest wstanie utrzymać 20 [N] ( wynika to z proporcji). Parametr ten informuje nas czy silnik ma wystarczającą siłę aby go użyć w naszym projekcie.
Prędkość obrotowa oznacza maksymalną ilość obrotów jaką może nam zapewnić silnik w określonym czasie.
ZALEZNOŚCI - Im bardziej zwiększamy moment obrotowy tym silnik jest silniejszy ale wolniej się kręci czyli zmniejsza się prędkość obrotowa, i odwrotnie jeśli zwiększamy obroty to zmniejszamy moment obrotowy, zależność ta jest proporcjonalna. Można zwiększyć zarówno prędkość obrotową jaki moment ale kosztem wagi i wymiarów silnika które wzrosną oraz ceny bo więcej będzie kosztował taki silnik.
Dodatkowe czynniki wpływające i informujące nas o momencie obrotowym i prędkości obrotowej w poszczególnych typach silników:
2.1 Silniki Szczotkowe
W przypadku modeli RC (zdalnie sterowanych) grubości drutu nawojowego oraz ilości zwojów np. 10T oznacza 10 zwojów drutu na jednym ramieniu wirnika, im ich więcej tym mniejsza prędkość obrotowa i większy moment obrotowy. Natomiast grubość użytego do wykonania zwojów drutu-ten parametr nie jest zwykle opisywany. Wartość "T" dobieramy w zależności od przeznaczenia modelu : niskie "T" - szybkie , lekkie modele, wysokie "T" modele większe powolne ale silniejsze (większy moment obrotowy) stosowane tam gdzie liczy się płynna jazda na niskich obrotach.
2.2 Silniki Bezszczotkowe
Odpowiednikiem "T" w przypadku silników bezszczotkowych jest parametr "KV" ale jest odwrotnie proporcjonalny czyli mała ilość zwojów to to samo co wysoka wartość kV np. 5T = 7000kV,
"Kv" to prędkość obrotowa nie obciążonego silnika z jaką kręci się na każdy 1V napięcia np. przy 10v zasilania silnik 2200kv osiągnie obroty 22000RPM (obrotów na minutę ) np. drony latające( modele wyścigowe) mają większe KV są szybsze ale mają mniejszy udźwig.
2.3 Silniki Krokowe
Moment obrotowy i prędkość sczytuje się z wykresu podanego w specyfikacji technicznej producenta. Sprzedawcy podają natomiast moment trzymający w "Nm" lub "Ncm", należy pamiętać że to nie jest maksymalna siła z jaką jest wstanie ciągnąć dany silnik, tylko siła z jaką trzyma wał silnika dany ciężar (hamulec). Silniki te pozwalają na bardzo wolne obroty i jednocześnie duży moment obrotowy czego niema np. w silnikach bezszczotkowych.
Ad3. wymiary i waga silnika
W przypadku dronów latających staramy się uzyskać jak największą moc w stosunku do wagi silnika, interesuje nas ciąg i prędkość jaką zapewniają nam silnik. Najlepiej do takich projektów nadają się silniki bezszczotkowe. Możemy kupić mały silniki który zapewnia dużą prędkość ale mały moment obrotowy albo odwrotnie, ale żeby oba te parametry były wysokie a nie tylko jeden kosztem drugiego to musimy kupić silnik większej wagi i wymiarów i co za tym idzie droższy.
Jeśli chodzi o drony jeżdżące (samochody ) to tu waga silnika, wymiary i wydajność też jest ważna ale już nie tak bardzo jak w przypadku tych latających. To zależy od przeznaczenia, czy mają służyć do: nauki, zabawy, a może mają wykonywać jakąś prace wyręczając lub pomagając człowiekowi. A także czy mają poruszać się wolno czy szybko i gdzie chcemy je używać, po jakiej nawierzchni mają się poruszać, czy na podłodze w pokoju, czy na dworze, jeśli na dworze to czy będą się poruszały po asfalcie, czy po ziemi, kamieniach i tak dale.
Pojazdy pływające w tym przypadku waga silnika stanowi najmniejszy problem. Waga i wymiary silnika mogą zależeć od napędu jaki wybierzemy (śruba napędowa czy napęd powietrzny jak w ślizgaczach) i od przeznaczenia do czego mają być wykorzystane (motorówki do zabawy czy łodzie transportowe) oraz od prędkości jaką chcemy uzyskać.
Maszyny i automaty tu waga i wymiary nie mają specjalnie wielkiego znaczenia bardziej nam zależy na innych parametrach, chyba że ogranicz nas przestrzeń jaką mamy do dyspozycji, wtedy musimy się dostosować.
Elektronarzędzia- używamy ich ręcznie dlatego chcemy żeby waga i wymiary użytych w nich silników były ja najmniejsze przy możliwie optymalnych parametrach takich jak moment obrotowy, a jeśli chodzi o prędkość to zależy do czego mają służyć.
Ad4. Rodzaj zasilania
Jeśli chodzi o wybór DC czy AC to informacje szukamy w specyfikacji technicznej sterownika i silnika.
Do zasilania można używać:
Ad5. Rodzaj sterownika
Ad6. Cenna
Oprócz jakości użytych materiałów i technologii wytworzenia na cenę silnika wpływają jego wymiary, waga, moc, moment obrotowy, prędkość obrotów i przeznaczenie do czego ma być użyty.
Tych jeszcze nie będę omawiał, chciałem tylko zaznaczyć że również jest możliwość ich sterowania (użycia) za pomocą modułu arduino
Zamierzam jeszcze w tym dziale bardziej szczegółowo omówić silniki krokowe, ale na konkretnych przykładach pokazując jak ich można używać i wykorzystywać, ponieważ uważam że to one mają największy wpływ na postęp technologiczny, występują wszędzie tam gdzie: roboty, drony, precyzyjne ruchy w fabrykach, szpitalach, laboratoriach w specjalistycznych urządzeniach.